A policy to enable the use of general-purpose manipulators in high-speed robot air hockey

To perform well on highly dynamic tasks, robots should be able to move quickly and be highly reactive. As robots typically have physical constraints and hardware limitations, computer scientists should also develop planners and trajectory optimization techniques that will enable them to perform rapid movements.
One example of a highly dynamic task that robots could complete is playing air hockey, a game in which players try to push a plastic disk into their opponent’s goal across a specifically designed table. While several roboticists have tried to train robots to play air hockey in the past, only a few have attempted to achieve highly dynamic behavior using conventional, general purpose robotic manipulators.
Researchers at Technische Universitat Darmstadt, Huawei R&D and University College London (UCL) have recently developed a trajectory optimization technique that could enable the use of general-purpose robotic manipulators in high-speed robot air hockey. This policy, presented in a paper pre-published on arXiv, allows conventional robotic arms to perform fast movements and efficiently hit disks across an air hockey table.
“Our long-term objective is to design an intelligent robot for complex, dynamic, constrained tasks,” Puze Liu, one of the researchers who carried out the study, told TechXplore. “In this paper, our main research question is: “how can we push the performance of the current industrial robot to the limits?” The robot air hockey is a well-suited task for this question, as it requires fast and precise movement in a highly constrained environment.”

The key challenge when training robots to play air hockey is that robot joint velocity limits do not typically confer fast hitting movements to robotic manipulators. A possible solution to this is to exploit the robot redundancy to assign the workload of the slowest robotic joint to the fastest one.
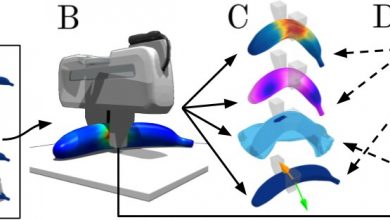
“In simple words, one could see the manipulator as a human arm and our method optimizes the elbow position to perform fast-hitting movements,” Liu explained. “In contrast with previous approaches that use redundancy to increase the workspace of the robot or enable compliance to unexpected contacts, we exploit the redundancy to increase the end-effector speed.”
The trajectory optimization method developed by Liu and his colleagues is based on a simple constrained optimization problem that is easy to solve and thus can be efficiently applied to real robots. Moreover, the technique can perform computations quickly, which means that it could help to make robots more reactive while they tackle dynamic tasks, such as playing air hockey.

“We also found that we can identify the system parameters in a black-box fashion, using Bayesian optimization,” Liu said. “This method does not require expert knowledge or a differentiable simulator.”
The researchers evaluated their trajectory optimization technique in air hockey simulations of two KUKA LBR IIWA, general-purpose robotic systems developed by KUKA Robotics. Their findings were highly promising, as their technique allowed the robotic systems to play efficiently against each other on a medium-sized air hockey table.

“We found that there is still room for improvement in the performance of current robotic manipulators,” Liu said. “We think that existing robots can solve complex tasks such as air hockey. Our plan for future work is to implement the full system on real robots. In the future, we will try to defeat our ‘robotics expertise’ with the help of machine learning techniques.”
Conclusion: So above is the A policy to enable the use of general-purpose manipulators in high-speed robot air hockey article. Hopefully with this article you can help you in life, always follow and read our good articles on the website: Ngoinhanho101.com